Missions · Active
Mission conceptADAPT
Autonomous Drag-based Adaptive Planning and Targeting — a 6U CubeSat that learns in orbit to control its own trajectory using differential drag and reinforcement learning, with no onboard propellant. Funded under the 2026 UNP Mission Concept program.
The problem
Small satellites today rely on ground-built atmospheric models to predict drag — but real-world drag at orbit altitude can deviate from those models by tens of percent, depending on solar weather, geometry, and the satellite’s own attitude. That mismatch makes precise, propellant-free maneuvers hard, and it forces operators to keep humans tightly in the loop.
What ADAPT does
ADAPT is a 6U CubeSat designed to learn its own drag response in orbit. Instead of using a static model uploaded from the ground, the spacecraft trains a small onboard neural network using its GPS-derived trajectory as ground truth — learning how attitude changes affect orbital evolution under the actual atmosphere it’s flying through. Once the model is good enough, the spacecraft uses it to plan attitude-driven drag maneuvers and adjust its own orbit. No thrusters required.
How it works: three phases
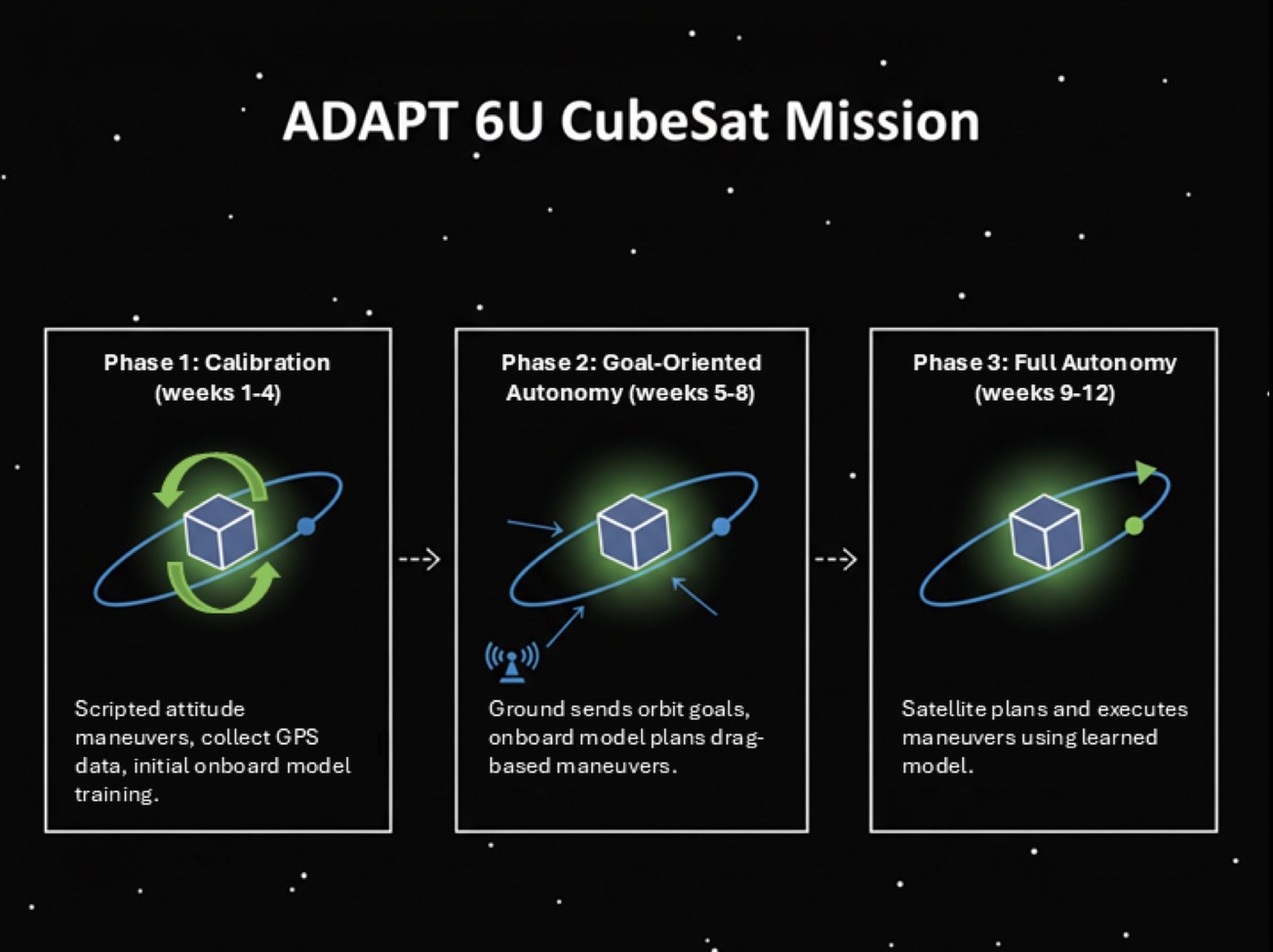
The mission unfolds in three escalating phases of autonomy, each a few weeks long.
- Phase 1 — Calibration. The spacecraft executes a pre-scripted sequence of attitude maneuvers, recording how each one perturbs its orbit. This data trains the initial onboard model.
- Phase 2 — Goal-oriented autonomy. Ground operators specify desired orbit adjustments. The onboard model decides which attitude maneuvers will achieve them, plans the sequence, and executes.
- Phase 3 — Full autonomy. The spacecraft plans and executes drag maneuvers on its own to maintain or modify its orbit, with no ground intervention.
Technical approach
The control architecture uses reinforcement learning — specifically a teacher–student framework. A high-capacity teacher policy is trained on the ground using a high-fidelity orbital simulator (with realistic atmospheric variability, GPS noise, and sensor dropouts). A smaller student network, derived from the teacher and sized for the flight processor, runs onboard and is fine-tuned in flight using real GPS data as training labels.
Mission Concept phase deliverables include a validated simulation environment, a hardware-in-the-loop testbed using flight-representative embedded compute, characterizations of learning convergence and prediction-error bounds under uncertainty, and safety and authority limits for the on-orbit fine-tuning loop.
Why it matters
Most on-orbit AI to date has focused on perception — classifying images, filtering data, detecting anomalies. ADAPT pushes onboard learning into the much harder domain of guidance, navigation, and control, where stability, interpretability, and safety constraints are far more demanding. The methods, safety envelopes, and validation tools developed here lay the groundwork for future autonomous constellations, responsive Earth-observation fleets, and resilient space architectures relevant to both NASA and the Department of Defense.
Team and program
ADAPT is led by Evan Jellison (Principal Investigator, Lab Coordinator) with Dr. Blagoy Rangelov as Co-PI. The work is funded under the University Nanosatellite Program (UNP) Mission Concept 2026, awarded in March 2026. The Mission Concept phase will engage roughly 10–15 students per year across simulation development, embedded software, hardware-in-the-loop testing, and mission operations.