News ·
ADAPT mission concept selected for UNP funding.
Space Lab’s proposal for an autonomous, propellant-free orbit-control CubeSat has been selected for the 2026 University Nanosatellite Program Mission Concept program.
Texas State University Space Lab has been selected for the 2026 University Nanosatellite Program (UNP) Mission Concept program with a proposal titled ADAPT — Autonomous Drag-based Adaptive Planning and Targeting. The award funds Mission Concept-phase work on a 6U CubeSat that uses reinforcement learning to control its own orbit through differential drag, without onboard propellant.
What ADAPT will do
Most small satellites today rely on ground-derived atmospheric models to plan drag maneuvers — models that can deviate from real on-orbit conditions by tens of percent. ADAPT proposes a different approach: train a small neural network onboard, in flight, using the spacecraft’s own GPS-derived trajectory as ground truth. Over time the model learns the satellite’s actual drag response, and the spacecraft uses it to plan attitude-driven maneuvers and adjust its orbit autonomously.
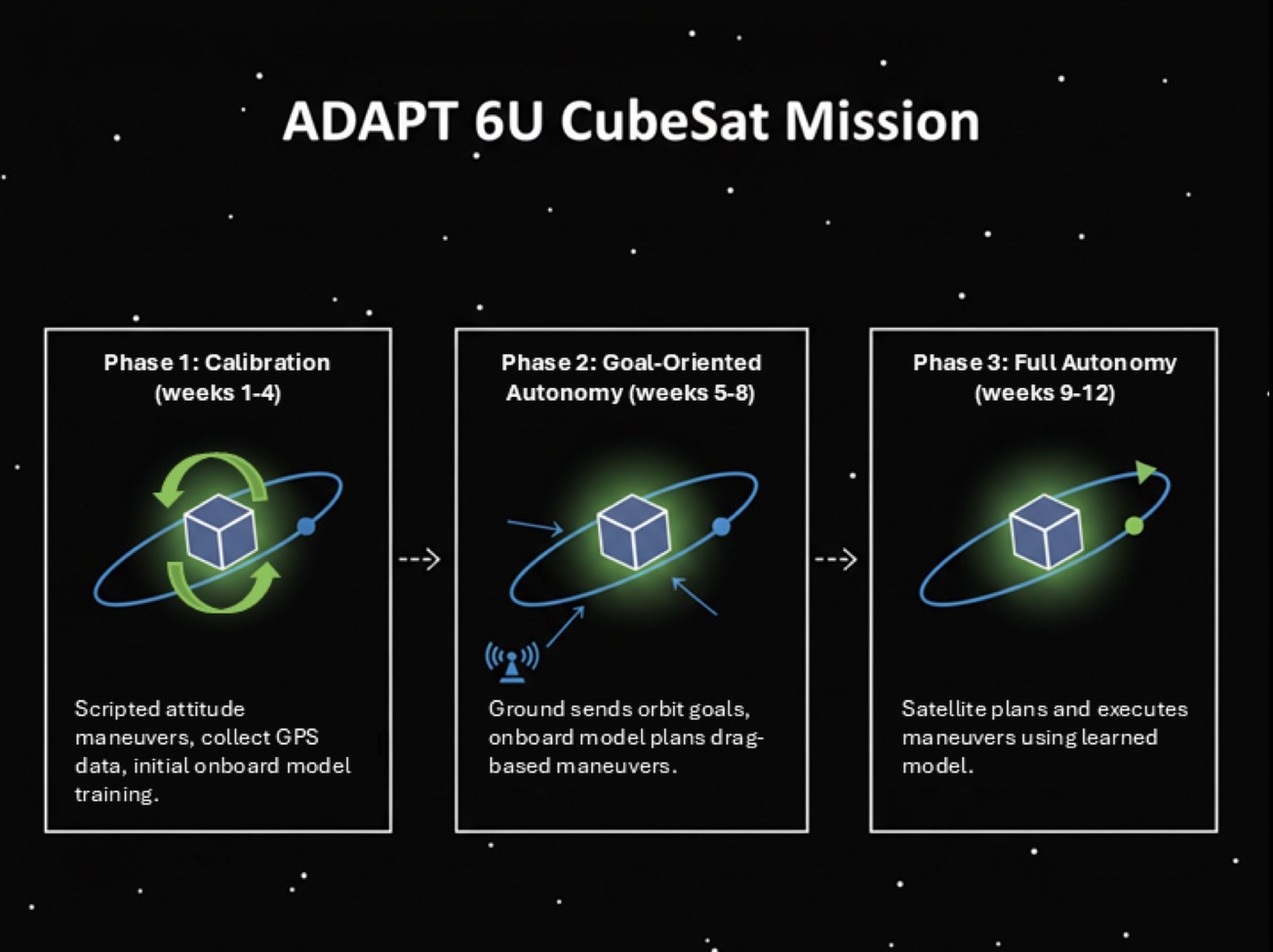
The mission unfolds across three phases of escalating autonomy: a calibration phase with scripted maneuvers, a goal-directed phase where the ground sets objectives and the spacecraft plans how to meet them, and a full-autonomy phase where the spacecraft plans and executes its own drag-based maneuvers.
What gets built during Mission Concept
The Mission Concept phase doesn’t fly hardware — it produces the architecture, simulations, and validation work needed for a credible flight mission. Specifically:
- A high-fidelity simulation of differential-drag-based orbit control under realistic atmospheric and sensor uncertainty.
- Reinforcement-learning architectures and training procedures benchmarked against rule-based controllers.
- A teacher–student learning framework with explicit safeguards, update schedules, and authority limits.
- A hardware-in-the-loop testbed pairing flight-representative embedded compute with a real-time orbital dynamics simulator.
- Quantitative characterizations of learning convergence, prediction-error bounds, and decision reliability under uncertainty.
Team and impact
Evan Jellison, Lab Coordinator and Assistant Professor of Instruction in Physics, serves as Principal Investigator. Dr. Blagoy Rangelov, the Space Lab’s PI, is Co-PI. The Mission Concept phase will engage roughly 10–15 students per year across guidance/navigation/control, simulation, embedded systems, and mission operations — with subsystem leadership roles modeled on professional aerospace practice.
For Texas State, ADAPT represents the lab’s pivot from hardware-focused satellite development (BobcatOrbiter, PROVES-Maia) toward software-intelligent spacecraft. The simulation environment, autonomy testbed, and reusable software stack built during this phase will become permanent assets for the lab and feed directly into the M.S. in Physics concentration in Space Technology and Remote Sensing.